论文名称:Occupancy Networks: Learning 3D Reconstruction in Function Space
Reference (其实就是复制粘贴了大佬的 papernote
https://blog.csdn.net/qq_34342853/article/details/120078510
三维重建任务:把2D图像映射到3D虚拟场景下。3D物体通常有voxel,point,mesh表征三种方式。
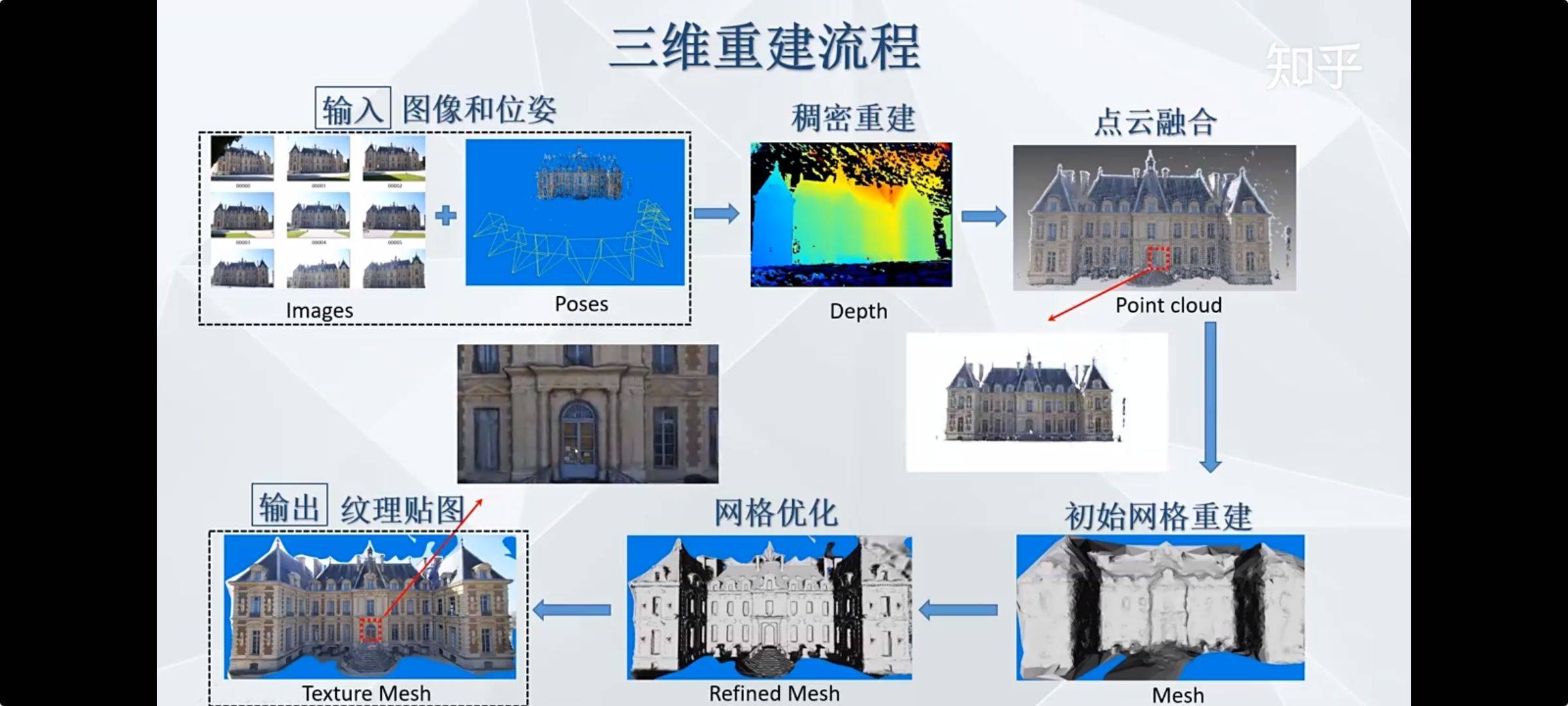

关于 mesh 表征:
缺点: only able to generate meshes with simple topology, require a reference template from the same object class or cannot guarantee closed surfaces
Method
本文提出了occupancy表征。
首先定义occupancy function:
然后定义occupancy network:

给每个实空间的3D点一个0-1之间的占用概率(因此和二分类模型等价)。神经网络f输入是一个点和一个几何体的表示(X),输出是一个0-1之间的实数,表示这个点在这个几何体里的概率。
所以 occupancy network 的损失函数是二分类,判断 batch 里采样点是否在 object 里面。
此外,occupancy network 也可以用来学习 概率隐变量模型(probabilistic latent variable models),作为生成模型的 encoder 部分。

occupancy network 的架构:
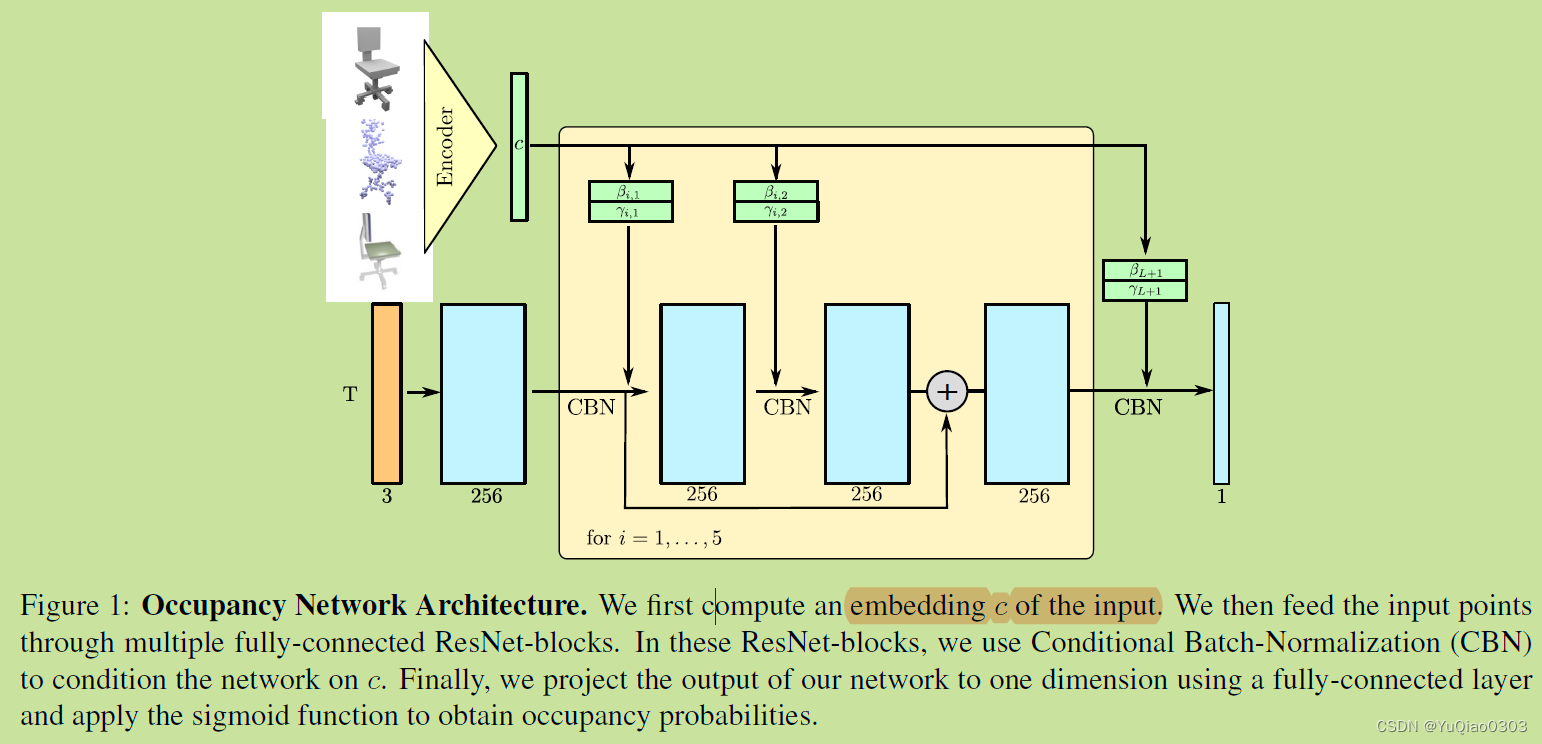
输入是一个几何体的表示和T个3D点,输出每个点被 occupied 的概率
embedding 可以是图像(ResNet),稀疏的体素(3D CNN),点云(PointNet)
conditional BN:gamma 和 beta 是 linear 生成的
Inference
Multiresolution IsoSurface Extraction (MISE) 多分辨率等值面提取
 `
`
Tesla AI Day

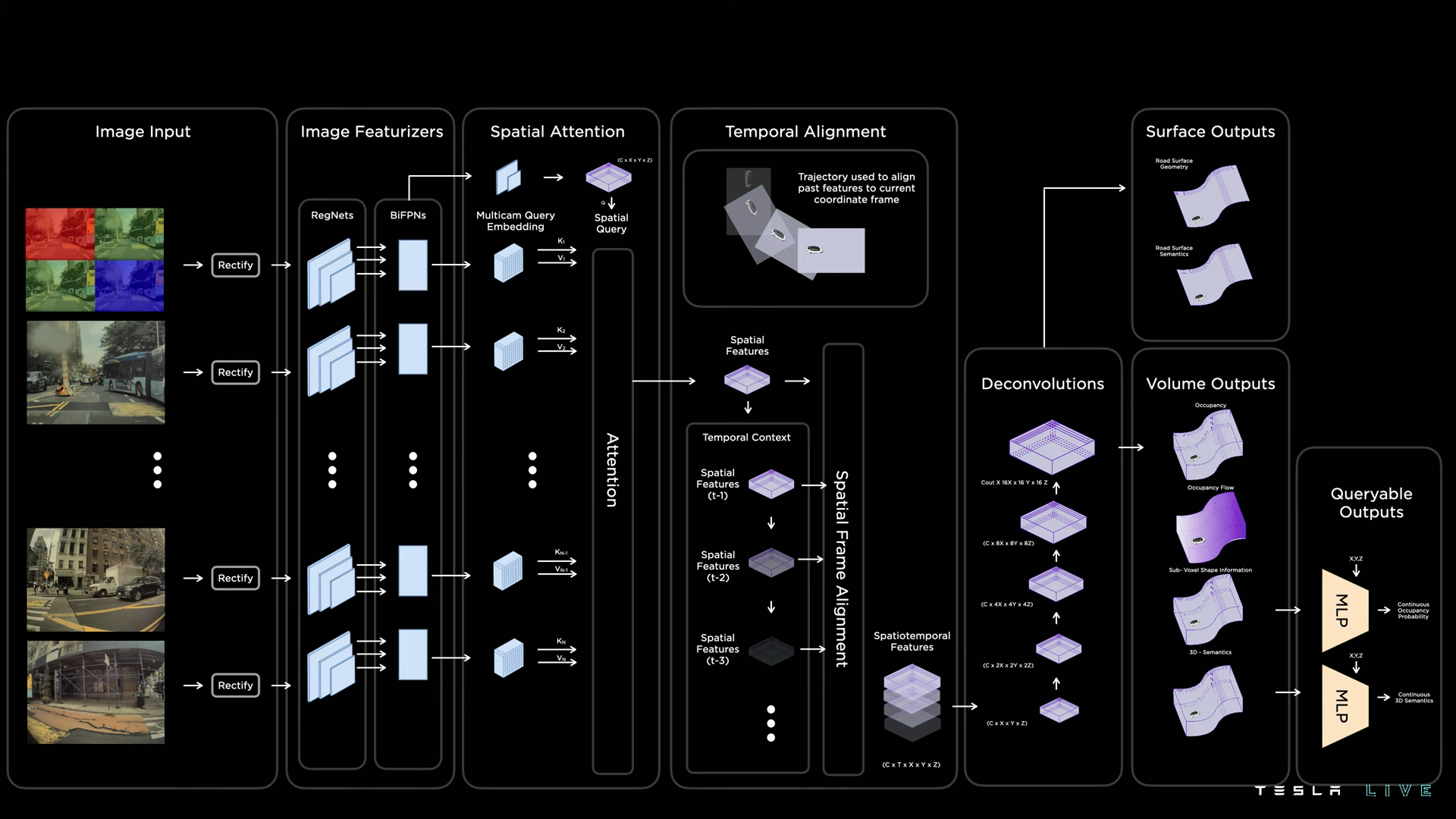
- 网络输入
- augment 之后的当前帧 multi-camera image
- 网络结构
- 先 spatial attention得到spatial feature
- spatial frame alignment怎么做的没看懂
- 用spatiotemporal feature去做上采样
- 网络输出
- Volume Outputs 输出的是 occupancy / occupancy flow / sub-voxel shape information / 3D semantics
- Surface Outputs 输出的是 road surface geometry / road surface semantics
- 网络预测
- queryable outputs 和 occupancy network 是相同的,输入的是图像特征和具体的XYZ,MLP判断当前3D点的occupancy prob
- NeRF State 有什么用没看懂
文档信息
- 本文作者:Mengqi Cao
- 本文链接:https://rogercmq.github.io//2022/10/04/Occupancy_Network/
- 版权声明:自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)